Robotics

History of Robotics
77-100 BC
The Antikythera Device was a mechanical computer that possibly calculated the position of the sun, moon, and planets. It is considered to have been created by Greeks.

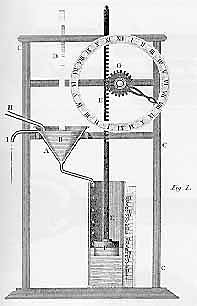
270 BC
An Greek engineer named Ctesibius created organs and water clocks that had movable figures. His water cook was a reservoir with a hold in the bottom, and was orchestrated so that it would take 24 hours for the water to empty out of the reservoir.
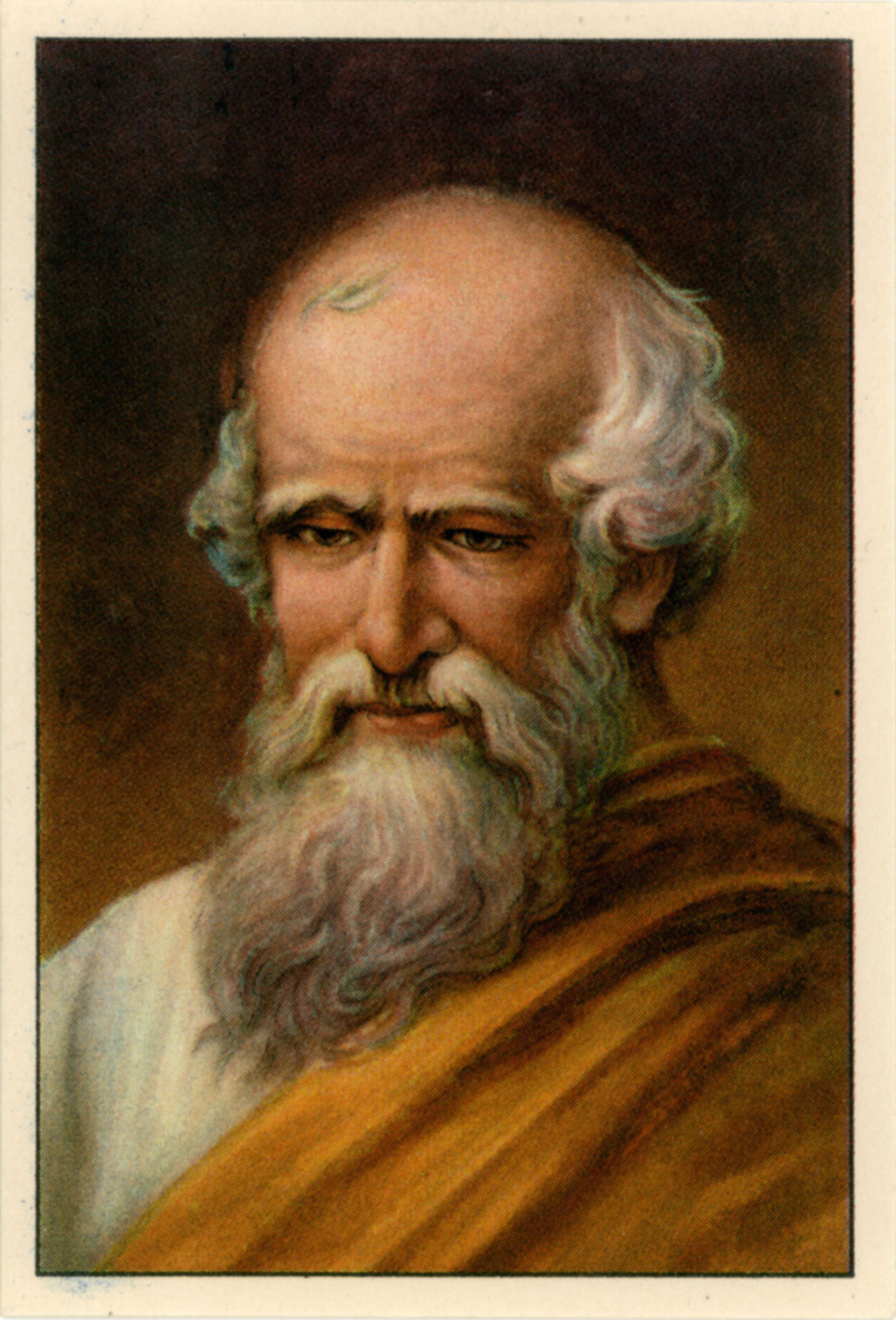
278-212 BC
Archimedes, a well-known inventor, created many mechanical systems that are still used in robotics today. He also helped with advances in mathematics.
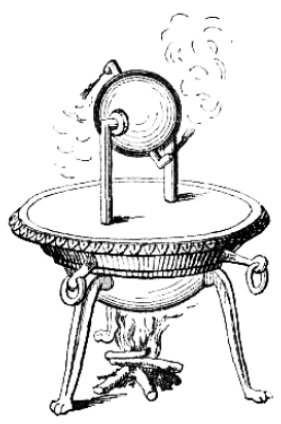
10-70 AD
The Hero of Alexandria, a mathematician, physicist, and engineer, wrote the book named Automata, a collection of different devices. He designed an odometer that was meant to be mounted on a cart to measure the distance that was traveled. He also invented a wind-powered organ, moving statues, and the Aeolipile. The Aeolipile, although it didn't properly function, is considered to be the base of a steam engine.
Medieval Times
During the Medieval Times, many automatons were built. Automatons were creations that were designed to look like humans and were run on hidden mechanisms. They were mainly used to impress peasants to believe that there was a higher power. One automaton was a clock jack, a mechanical figure that told time by striking a bell with its axe.
1495
Leonardo da Vinci designed the first humanoid robot, although nobody knows if the design was ever actually produced. The robot was made to sit up, move its arms, and move its head while opening and closing its jaws.
1645
Blaise Pascal invented the Pascaline, a calculating device, to help his father with taxes. 50 Pascalines were built in total.

1666
Samuel Morland built a miniature version of the Pascaline.
18th Century
Miniature automatons became very popular and were used as toys for very wealthy citizens. These automatons were built to simulate people and small animals.
1709
Jacques de Vaucanson built "The Duck". This device could flap its wings, eat, and digest grain. It was extremely detailed, with each wing containing over four hundred moving parts.

1801
Joseph-Marie Jacquard invented a machine that was programmed to create designs that would be printed onto cloth or tissue, much like an early sewing machine.
1865
John Brainerd created the Steam Man, a machine used to pull wheel carts and do other tasks. Later, Frank Reade Jr. built an electric version of the Steam Man.
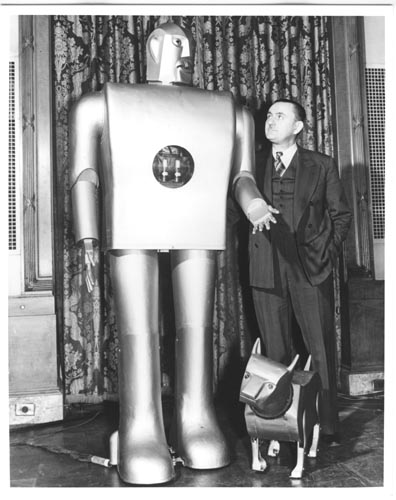
1937-1938
Westinghouse creates ELECTRO, a robot designed in human likeness that could walk, talk, and smoke. ELECTRO was featured at the 1939 world's fair.
1942
Isaac Asimov writes the "Three Laws of Robotics". Later, a zeroth law was added.
1645
Blaise Pascal invented the Pascaline, a calculating device, to help his father with taxes. 50 Pascalines were built in total.
1666
Samuel Morland built a miniature version of the Pascaline.
18th Century
Miniature automatons became very popular and were used as toys for very wealthy citizens. These automatons were built to simulate people and small animals.
1709
Jacques de Vaucanson built "The Duck". This device could flap its wings, eat, and digest grain. It was extremely detailed, with each wing containing over four hundred moving parts.
1801
Joseph-Marie Jacquard invented a machine that was programmed to create designs that would be printed onto cloth or tissue, much like an early sewing machine.
1865
John Brainerd created the Steam Man, a machine used to pull wheel carts and do other tasks. Later, Frank Reade Jr. built an electric version of the Steam Man.
1937-1938
Westinghouse creates ELECTRO, a robot designed in human likeness that could walk, talk, and smoke. ELECTRO was featured at the 1939 world's fair.
1942
Isaac Asimov writes the "Three Laws of Robotics". Later, a zeroth law was added.
- Law One: A Robot may not injure a human (or humanity), or, through inaction, allow a human (or humanity) to come to harm.
- Law Two: A robot must obey orders given to it by human beings, except where such orders would conflict with a higher order law.
- Law Three: A robot must protect its own existence as long as such protection does not conflict with a higher order law.
- Law Zero: A robot may not injure a human being, or, through inaction, allow a human being to come to harm, unless this would violate a higher order law
Also in 1942, William Pollard and Harold Rosalind created the first "programmable mechanism". The mechanism was a paint-sprayer, and was created for the DeVilbiss Company.
1946
George Devol created a playback device that controlled machines using magnetic recordings.
1947
While studying how electrons acted on the surface of a semiconductor, Walter Brattain accidentally created the first transistor.
1948
W. Grey Walter made his first robots, known as the turtle robots. The robots, Elmer and Elsie, could find their own charging stations when their power was running out.
1951
Raymond Boertz made the first tele-operated arm for the Atomic Energy Commission, which was a major milestone in force feedback technology.
1954
George Devol created the first completely programmable robot, named UNIMATE for "Universal Automation".
1956
George Devol and Joseph Engelberger created the first robotics company, Unimation.
Robots Today
Pepper - The Emotional Robot
Recently, Aldebaran, a robotics company, created a robot named Pepper. Pepper, known as "the first humanoid robot designed to live with humans", is designed to read people's emotions and react accordingly. With an amiable and friendly personality, Pepper is meant to be the ideal companion. In fact pepper is already greeting customers in the stores of SoftBank Mobile, a major phone operator in Japan who commissioned the creation of Pepper.

Pepper's defining characteristic is that he can read human emotions. Pepper analyzes people's facial expressions, body language, and speech habits and translates them into his knowledge of the universal emotions (joy, surprise, anger, doubt, and sadness). Once he guesses your mood, he will react to it. For example, he may try to make people happier by playing their favorite song. Along with reading human emotions, Pepper is able to express emotions too. Pepper is known to have a unique personality based on his body language, voice, and funny gestures.

Programming

Computer Programming Language
There are many different languages that are used to give detailed instructions to a computer to do various tasks. Depending on the use for the computer, the programs can either be "high-level" or "low-level" programs. High level programs are easily read and written by programmers, while low level programs require programmers to manage individual operations and data.
Machine and assembly languages - a machine language mainly consists of number codes that a computer can execute directly. This code is made up of the digits "1" and "0" . This code is very difficult to read or write because it is not similar to normal numeric notation or any human language. Also, the codes are different for each computer. Assembly language is a step above machine language. It uses some phrases for instructions, which contain blocks of data. For example, to add two numbers, instead of writing "0110101100101000", a person could write "add pay, total".
Algorithmic languages - algorithmic languages are designed to express mathematic and symbolic functions. They have similar notation to mathematics and have subprograms that enable the user to reuse commonly used operations. Algorithmic languages were the first high-level languages. There are several Algorithmic languages, like FORTRAN, ALGOL, LISP, and C (which has spin-offs like C++ and C++++).
Business-oriented languages - there are two main business-oriented computer languages: COBOL and SQL. COBOL could record data structure for businesses that had to compute and organize large amounts of data. Information such as name, ID number, age, and address were collected in a record through this language. This "chunking" appears in many modern languages. SQL is targeted towards organizing databases and can query a database for specific information. Many commercial database programs use this language.
Education-oriented languages - The four main education-oriented languages are BASIC, Pascal, Logo, and Hypertalk. Basic, designed at Dartmouth College, was intended to be an easy program to learn for beginners. It was translated line-by-line so it would be easy to spot mistakes. Pascal was used to emphasize conditional and loop control structures with no GOTO statements. It was similar to ALGOL's notation but could organize complicated data. Logo, created in the 1960s, was made to be a simplified version of LISP and to be used for education. It is very simple, and is used to teach mathematics and basic programming skills. Hypertalk allowed people to combine text, visuals, and audio into a group. Hypertalk was commonly used for school multimedia presentations.
There are also many other types of computer languages, including object languages, declarative languages, scripting languages, document formatting languages, and many others that all contribute to the world of technology that we know today.
Algorithmic languages - algorithmic languages are designed to express mathematic and symbolic functions. They have similar notation to mathematics and have subprograms that enable the user to reuse commonly used operations. Algorithmic languages were the first high-level languages. There are several Algorithmic languages, like FORTRAN, ALGOL, LISP, and C (which has spin-offs like C++ and C++++).
Business-oriented languages - there are two main business-oriented computer languages: COBOL and SQL. COBOL could record data structure for businesses that had to compute and organize large amounts of data. Information such as name, ID number, age, and address were collected in a record through this language. This "chunking" appears in many modern languages. SQL is targeted towards organizing databases and can query a database for specific information. Many commercial database programs use this language.
Education-oriented languages - The four main education-oriented languages are BASIC, Pascal, Logo, and Hypertalk. Basic, designed at Dartmouth College, was intended to be an easy program to learn for beginners. It was translated line-by-line so it would be easy to spot mistakes. Pascal was used to emphasize conditional and loop control structures with no GOTO statements. It was similar to ALGOL's notation but could organize complicated data. Logo, created in the 1960s, was made to be a simplified version of LISP and to be used for education. It is very simple, and is used to teach mathematics and basic programming skills. Hypertalk allowed people to combine text, visuals, and audio into a group. Hypertalk was commonly used for school multimedia presentations.
There are also many other types of computer languages, including object languages, declarative languages, scripting languages, document formatting languages, and many others that all contribute to the world of technology that we know today.
Sources:
http://www.britannica.com/technology/computer-programming-language
http://www.robotshop.com/media/files/PDF/timeline.pdf
Excellent blog about robotics, keep up the good work and share more.
ReplyDeleteRobotic Process Automation Courses | learn Robotic Process Automation
meghan-duchess-of-sussex
DeleteThanks for taking time to share this page admin. It is really helpful. Share more like this.
ReplyDeleteBest Python Training Institutes in Chennai |
Python Training courses |
Python Training classes in Chennai |
Python Training Chennai |
Python course in Velachery |
Python course in Tambaram
Thanks for sharing this information. This is really useful. Keep doing more.
ReplyDeleteIELTS Classes near Adyar
IELTS Classes in Indira Nagar
IELTS Training in Kasturibai Nagar
IELTS Classes in Gandhi Nagar
IELTS Coaching in Chennai Anna Nagar
IELTS Coaching Centre in Anna Nagar East
Best IELTS Classes in Chennai Anna Aagar
Very useful information. Thanks for sharing this blog!! For more information click here:-
ReplyDeleteDistance Education
National Institute of open Schooling
Computer Training Certificate
MS Office Course
Interior Design
Certified Ethical Hacker Certification
Robot Programming
Rscit Certificate
Nice Blog!! Thanks for kind information. For more information click here:-
ReplyDeleteRobotics Program
rscit certificate
personality development
ethical hackers academy
interior architecture courses
ms office computer course
national institute of open schooling result
distance education
Lego Robotics Class
ReplyDeleteGet the best Lego Robotics Class for Kids in Singapore at Bricks4Kidz. We are a Lego Robotics Class learning space for kids after school programs. Contact us - 6224 4123
to get more - https://www.bricks4kidz.com.sg/robotics-classes-for-kids
Robotics Class for Kids
ReplyDeleteGet the best Lego Robotics Class for Kids in Singapore at Bricks4Kidz. We are a Lego Robotics Class learning space for kids after school programs. Contact us - 6224 4123
to get more - https://www.bricks4kidz.com.sg/robotics-classes-for-kids/
Lego Robotics Class
ReplyDeleteGet the best Lego Robotics Class for Kids in Singapore at Bricks4Kidz. We are a Lego Robotics Class learning space for kids after school programs. Contact us - 6224 4123
to get more - https://www.bricks4kidz.com.sg/robotics-classes-for-kids/
I like to say Thanks for these Articles.It is helpful for getting new ideas.Keep doing More
ReplyDeletepython training in chennai | python training in annanagar | python training in omr | python training in porur | python training in tambaram | python training in velachery
Nice Blog
ReplyDeleteRobotics Course
Robotics Class for Kids
ReplyDeleteIf you are looking at robotics class for kids, then Bricks4Kidz is the best lego robotics class for kids in Singapore. We provide the best education to your child through science, technology, engineering and mathematics.
to get more - https://www.bricks4kidz.com.sg/robotics-classes-for-kids/
Very nice blog. Thank u fir sharing this.
ReplyDeleteRobotics, also known as the application of practical methods that are involved in science and technology.
O’botz is a widely recognized multi-disciplinary Robotics program for children aged 8+ years. It helps children to develop critical thinking, problem-solving and creative skills for success in school and beyond.
Lego Robotics Class
ReplyDeleteIf you are looking at robotics class for kids, then Bricks4Kidz is the best lego robotics class for kids in Singapore. We provide the best education to your child through science, technology, engineering and mathematics.
to get more - https://www.bricks4kidz.com.sg/robotics-classes-for-kids/
Great work! We are an expert Robot manufacturer in Delhi. Our vision is to create global presence in power transmission by innovating and developing products (Servo planetary, Strainwave gearboxes, Six axis, Pic & place robots, AGV and engineering solutions) to enhance value and satisfaction of our customers. Robot manufacturer in Delhi
ReplyDeleteHi, i like to read your blog. We provide the best robot classes in Australia.
ReplyDeleteThis is a very good article great
ReplyDeletepython course
Incredibly conventional blog and articles. I am really very happy to visit your blog. Directly I am found which I truly need. please visit our website for more information about Machine Learning Development Company in Australia
ReplyDeleteReally appreciable post you have shared in your blog is very good content I learned alot from it If any one looking for institute for computer training .contact here-+91-9311002620 Or Visit Website- https://www.htsindia.com/Courses/hardware-and-networking/best-basic-computer-course-institute-in-delhi
ReplyDeleteIts very interesting and very useful blog .Directly I am found which I truly need. please visit our website for more information about Robotic Process Automation Company
ReplyDeleteThat was such an awesome topic to read and going through it.
ReplyDeleteThanks for such a good information.
Top 10 Companies Developing Robotics Hands to Watch Out in 2021
Great Blog!! Thank you for sharing. Kids get to learn science in a very practical way which also makes the lessons so entertaining. We also offer science-based birthday parties, community programs and all sorts of events. Super Science Programs for Kids made science fun for the kids.
ReplyDeleteOne of the amazing write up and I really loved it.
ReplyDeleteFor best robotics course and coding classes one can check
course for robotics
online robotics classes for kids
Thanks for giving this wonderful insight about coding and robotics for kids. One may find more useful information about robotics for kids and stem education
ReplyDeleteRobotics course in Noida
ReplyDeleteNice Post Really informative
ReplyDeletebest supply chain management software
Automated Storage and Retrieval System
stretch wrapping machine
Robotics classes for kids online with numerous fun learning and free certified demo classes where 1:1 sessions with expert teachers.
ReplyDeleteRobotics Training in Delhi
ReplyDeleteThanks for sharing this post its very informative post by the way If anyone look for Ms Office training institute in Delhi Contact Here-+91-9311002620 Or Visit our website https://www.htsindia.com/Courses/microsoft-courses/ms-office-course
ReplyDelete
ReplyDeleteLinux Training Course in Delhi
Automated Forex Trading With ETRADE LOG ON Metatrader 4 - Download .
ReplyDeleteEmbedded Systems Training Institute in Delhi
ReplyDeletePython Course in Delhi
ReplyDeleteFrom precision machining & manufacturing to jig grinding, everything about car manufacturing today is based on automation. Robots and automation aren’t our future- they are the present and future, both.
ReplyDeleteHowever hiring experts to design prototypes, that suit your manufacturing requirements is vital.
AWS Course in Delhi
ReplyDeleteCCNA Training in Delhi
ReplyDeleteI Like to add one more important thing here, The Educational Robots Market is expected to be around US$ 1974 Million by 2025 at a CAGR of 17% in the given forecast period.
ReplyDeleteTruly I love this blog . Directly I am found which I truly need. please visit our website for more information about Enterprise Chatbot Solutions
ReplyDelete
ReplyDeleteThank you for this amazing blogs keep updating us
if someone is looking for the best training institute in delhi for e- accounting course , my recommendation is High Technologies Solutions.
High Technologies Solutions Institute is one of the Best E accounting institute in delhi in which you learn GST returns, TDS returns, ITR Filing, Advance Tally, Advance Excel
So, if you want to choose a good career option in accounts field, then choose an e-accounting course in Delhi from HTS india . We are known as the best .. for the e- accounting course.
you will get job placemens from here.
For more details call us on 9311002620
visit website for more details -https://www.htsindia.com/Courses/tally/e-accounting-training-course
Incredibly conventional blog and articles. I am really very happy to visit your blog. Directly I am found which I truly need. please visit our website for more information about Machine Learning Development Company
ReplyDelete
ReplyDeleteRobotics Course in Gurgaon
Thanks for this fantastic blog. it is really helpfull Are you exhausted from investing money in labor & want to Change company manual work into automatic. Contact Automated Solutions Australia for Robotics. Our professional & experienced staff will help you to assist. Reach us today to know more about Robotics Australia services Robotics Australia
ReplyDeleteThank you for this amazing blog, i am very satisfied with this blog. keep sharing this type of content with us
ReplyDeleteapart from this if someone is looking for the best training institute in delhi for any course which is given below,
you should go to High Technologies Solutions training institute
this is the one of the best computer institute in delhi for these course .
Best Training Institute for Python training Course in Delhi, NCR
Best Training Institute for AutoCAD Training Course in Delhi, NCR
Best Training Institute for SAP Training Course in Delhi, NCR
Best Training Institute for SAS Training Course in Delhi, NCR
Best Training Institute for c++ training Course in Delhi, NCR
Hello everyone,
ReplyDeleteI have seen a few reviews on here about making profit from crypto currency trading but I am here to introduce you to a genuine, fast and reliable way to make guaranteed profits in less than 8 days. I was having some financial difficulties less than 3 months ago and I got introduced to an expert trader by my colleague who had earlier talked about making some quick money from cryptocurrency trading, and i made an initial investment deposit of $1,000 and in a few days i got a return on investment of $9,400, i was amazed at the fast and safe nature of trading employed by this expert trader.. I will drop the contact info so you can make contact;
WhatsApp: +1 726 268 9140
Email : thomasraveneltrader@outlook.com
Robotics Training Course in Gurgaon
ReplyDeleteRobotics Training in Noida
ReplyDeleteHey admin, nice article. Nice to read your article. We hope to receive such valuable articles from you in the future. Thank you for sharing with everyone.
ReplyDeleteRedSensors: 3D LiDAR and Laser Sensor Technology
Mmorpg Oyunları
ReplyDeleteinstagram takipçi satın al
Tiktok Jeton Hilesi
Tiktok Jeton Hilesi
Sac ekimi antalya
Referans Kimliği Nedir
instagram takipçi satın al
Mt2 pvp serverlar
Takipci satın al
smm panel
ReplyDeleteSmm panel
iş ilanları
instagram takipçi satın al
hirdavatciburada.com
Https://www.beyazesyateknikservisi.com.tr/
servis
tiktok jeton hilesi
Such a great article keep sharing !Automatic Number Plate Recognition Software
ReplyDeleteNice post! This is a very nice blog that I will definitively come back to more times this year! Thanks for informative post.의정부출장아로마
ReplyDelete동해출장아로마
삼척출장아로마
속초출장아로마
원주출장아로마
Hey that’s an interesting blog about RPA. Found many useful insights. Keep up the good work and produce more blogs. Love from Iveond
ReplyDeleteVery useful articale. Thanks for sharing this with us. You can also check my website.
ReplyDeleteLatest Mod Apk
Thanks for share useful info keep on..
ReplyDeleterobot manufacturing companies
Automatic Number Plate Recognition Software
ReplyDeleteJust simply wished to say that it is an excellent post about the topic which you provided here.It is an interesting and valuable topic for us. Appreciate you for having this knowledge going. custom erp software development
ReplyDeleteThank you for sharing valuable article with us.
ReplyDeleteBest Automation Services Company/a>
Nice Post..custom software development
ReplyDeleteThanks for Sharing Amazing Content.
ReplyDeleteAtal Tinkering Lab
Great article, thank you for sharing the valuable information.
ReplyDeleteBest Robotic Process Automation Experts Company/a>
Amazing Post...
ReplyDeleteBeginners Robotics Course
Nice blog
ReplyDeleteRPA in Manufacturing | Can Save Time and Money
Nice content
ReplyDeleteTrusted RPA Specialists Improve Efficiency
Nice Blog Post!! Thank you for sharing this useful information about Robotics and its evolution. I appreciate your effort in this blog. Contact us if you need any help with Best Automation Services
ReplyDeleteI’ve recently started using this Henna Powder from www.yogisgift.com/products/henna-powder
ReplyDeleteit’s 100% natural, chemical-free and sourced directly from trusted farms, and it’s been doing wonders for my hair colour and scalp health!
If you’re planning to buy used boring mills in Canada or explore used CNC machining centers, this site offers some of the best options. You can also find quality vertical and horizontal machining centers, used vertical milling machines, and CNC turning centers for sale in Canada. Ideal for anyone looking for machinery tools and machining accessories in Canada at great prices.
ReplyDeletehttps://www.gizmo-mt.ca/horizontal-boring-mill